Model#
In this section, we delve into the model and its peculiarities. Firstly, an encoder-based transformer was chosen because the
interest was in predicting the next token rather than a sequence in an autoregressive manner. If that were the case,
an encoder-decoder approach would have been used, as the encoder would provide context and the decoder would provide
autoregressivity to the model regarding the predictions.
Backbone#
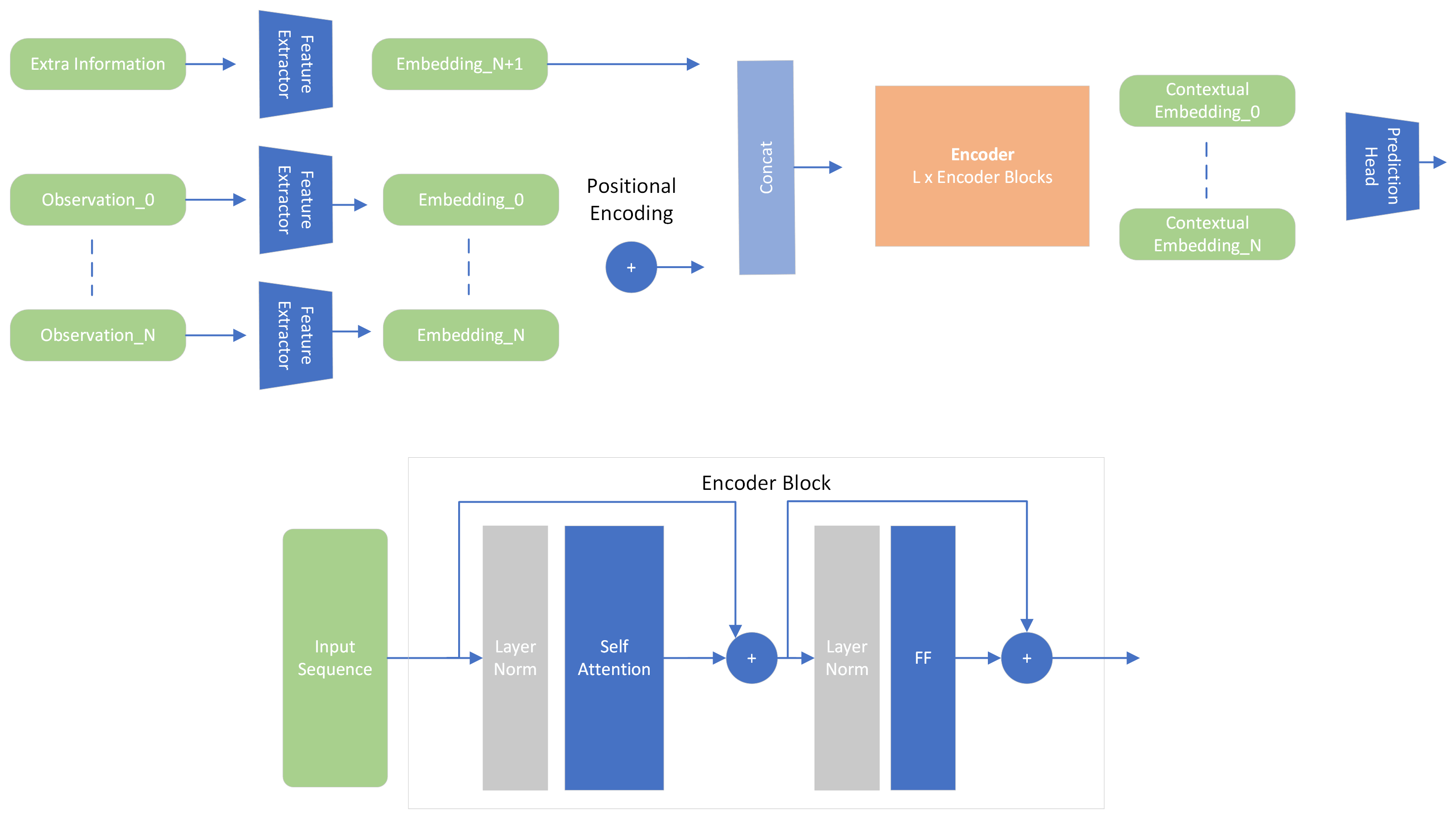
In this section, the common architecture of the model among the three approaches is shown. I won’t delve too much into detail because I assume that at this point, you’re familiar with the transformer architecture. If not, take a look at the paper Attention is All You Need.
Before passing through the encoder, a feature extractor has been integrated, which calculates embeddings with size d_model.
I could have quantized the input sequence timepoints to reduce the dimensionality (continuous to discrete), then get an integer token and pass it through
an embedding layer (same as with language). In fact, I followed that approach with extra_tokens. Which where actually not sequences but
extra information that could be added to the transformer input. For instance, the std of the window, the sentiment score…
As we are working merely with sequences, we need a way to represent the position of each token in the sequence. That is because attention mechanisms are permutation invariant (it computes a weighted sum of the input tokens). To solve this, I have implemented the absolute positional encoding as described in the paper. Additionally, I have integrated Time2Vec, which claims to be a powerful representation of time (it computes a linear and a sinusoidal representation of time). It can be interesting for cryptocurrencies because behaviour of price 2 years ago may not be the same as the behaviour of current price.
Extra information that is not sequence-related can be added to the model. Must compute an embedding of size d_model and add it to the sequence embeddings by concatenating them. As they are not sequence-related, they are not added a positional encoding.
The encoder is composed of N layers, each of which is composed of a multi-head self-attention mechanism and a feed-forward network. The output of the encoder is a sequence of vectors, each of which represents the extracted information of the input token at that position. Therefore, we need to flatten, average or get the last item of the sequence to get a single vector that will feed the prediction head. This is the same for all three approaches. This is configurable in the model’s configuration file.
(batch_size, sequence_length, d_model) -> (batch_size, d_model)
Jaxer's backbone
Model has been implemented using the compact version of flax (setup vs compact) which allows to define the layers of the module inside the
__call__ method. The setup method is more torch alike. Example of the implementation of FeedForward block:
class FeedForwardBlock(nn.Module):
""" Feed Forward Block Module (dense, gelu, dropout, dense, gelu, dropout)
:param config: transformer configuration
:type config: TransformerConfig
:param out_dim: output dimension
:type out_dim: int
"""
config: TransformerConfig
out_dim: int
@nn.compact
def __call__(self, x: jnp.ndarray) -> jnp.ndarray:
""" Applies the feed forward block module """
x = nn.Dense(
features=self.config.dim_feedforward,
dtype=self.config.dtype,
kernel_init=self.config.kernel_init,
bias_init=self.config.bias_init,
)(x)
x = nn.gelu(x)
x = nn.Dropout(rate=self.config.dropout)(
x, deterministic=self.config.deterministic
)
x = nn.Dense(
features=self.out_dim,
dtype=self.config.dtype,
kernel_init=self.config.kernel_init,
bias_init=self.config.bias_init,
)(x)
x = nn.gelu(x)
x = nn.Dropout(rate=self.config.dropout)(
x, deterministic=self.config.deterministic
)
return x
Mean prediction#
This is the most basic approach, and it consists of having a single neuron in the last layer of the prediction head. The prediction backbone is identical across the three approaches, and I will explain it only once here.
Prediction head consists on a set of dense layers or residual blocks (if residual connections are enabled) that map
(batch_size, d_model) to (batch_size, 1). The output of the model is the mean of the sequence, which is the actual
prediction.
Loss Function#
I have decided to use the mean squared error. It is the most common loss function for regression problems, and it is defined as:
Where \(y_i\) is the actual value and \(\hat{y}_i\) is the predicted value. However, there are other loss functions that could be used such as the mean average percentage error or the huber loss.
The jax implementation of the loss function is:
@jax.jit
def mse(y_pred: jnp.ndarray, y_true: jnp.ndarray) -> jnp.ndarray:
""" Mean Squared Error """
return jnp.mean(jnp.square(y_true - y_pred))
Note
@jax.jit decorator is used to compile the function to make it faster. Thanks to XLA, the function is compiled and
acts like a graph. Not every function can be jitted. More information
about @jax.jit can be found in the jax documentation.
Distribution prediction#
One thing I had in mind when designing the model was to be able to predict the uncertainty. How sure is
the model about the prediction? This question is extremely important because in the financial world, it is not only important to predict the
price but also to know the confidence of it (as in computer deep learning object detection). To be clear, if the model predicts that price is going up
but it is not sure about it, it is not a good idea to take a decision based on that prediction.
As an assumption, next token is modelled as a gaussian distribution. Therefore, mean and the log of the standard deviation of the distribution must be computed. Here, two approaches can be followed:
Using the same layer to predict both the mean and the log of the standard deviation.
Using two different layers to predict the mean and the log of the standard deviation.
Second approach has been implemented to let the model learn the appropriate weights for each output. The model can focus more on different components on the input vectors (if the model wants to).
Loss Function#
The loss function is the negative log likelihood of the predicted distribution. It is defined as:
Where \(\mu\) is the mean and \(\sigma^2\) is the variance of the distribution (gaussian). The loss function is the sum of the
log likelihood of the predicted distribution. The negative log likelihood is the most common loss function for distribution.
I did not add the KL divergence to the loss function, but as it measures how different two distributions are, it could be interesting to add it to the loss function.
The jax implementation of the loss function is:
@jax.jit
def gaussian_negative_log_likelihood(mean: jnp.ndarray, std: jnp.ndarray, targets: jnp.ndarray,
eps: float = 1e-6) -> jnp.ndarray:
first_term = jnp.log(jnp.maximum(2 * jnp.pi * jnp.square(std), eps))
second_term = jnp.square((targets - mean)) / jnp.clip(jnp.square(std), a_min=eps)
return 0.5 * jnp.mean(first_term + second_term)
Classification prediction#
This latest approach arose with the idea that perhaps predicting the price directly might not be as interesting, given the complexity of the task with the amount of available data. Instead, it might be more efficient and make more sense for a trader/bot to be able to predict in which range of values the price will fall. For example, determining that the price will be in the range of +2 to +3% or that it will increase by more than 5%. To solve this, the problem needs to be transformed into a classification problem.
The only thing we need to change is the output. We must define a set of bins that will represent the different ranges of values that the price can take. Last layer must have as many neurons as bins, and shall be activated with a softmax function to get the probabilities of the price being in each bin. The output of the model is the argmax of the probabilities.
Loss Function#
The selected loss function is the binary cross-entropy. It is defined as:
Where \(y_i\) is the actual value and \(\hat{y}_i\) is the predicted value. The binary cross-entropy penalizes models based on the difference between the predicted probability and the true label. The goal is that every prediction probability falls close to 1 for the true class and close to 0 the other ones.
The jax implementation of the loss function is:
@jax.jit
def binary_cross_entropy(y_pred: jnp.ndarray, y_true: jnp.ndarray, eps: float = 1e-6) -> jnp.ndarray:
""" Binary Cross Entropy """
return jnp.mean(-y_true * jnp.log(y_pred + eps) - (1 - y_true) * jnp.log(1 - y_pred + eps))
Results with the three approaches are shown in the Results section.
Model Configuration#
To configure the model, a configuration object must be filled:
d_model: int # dimension of the model
num_layers: int # number of encoder layers
head_layers: int # number of layers in the head
n_heads: int # number of attention heads
dim_feedforward: int # dimension of the feedforward network
dropout: float # dropout rate
max_seq_len: int # maximum sequence length (context window)
flatten_encoder_output: bool # flatten the encoder output
fe_blocks: int # number of feature extractor blocks
use_time2vec: bool # use time2vec
output_mode: str # output mode (mean, distribution, discrete_grid)
use_resblocks_in_head: bool # use residual blocks in the head
use_resblocks_in_fe: bool # use residual blocks in the feature extractor
average_encoder_output: bool # average the encoder output (if flatten_encoder_output is False)
norm_encoder_prev: bool # normalize the encoder output before the attention mechanism or after